„Roboter sind sensumotorische Maschinen zur Erweiterung der menschlichen Handlungsfähigkeit.“
(Christaller et al., 2001, p. 18)
Unter Roboter werden kombinierte technische Systeme verstanden, die aus verschiedenen funktionalen Komponenten bestehen. Die Komponenten eines Roboters können vereinfacht in Sensoren, Steuerungseinheit und Aktoren unterteilt werden (Oubbati, 2007, p. 10). Sensoren empfangen Daten zur Umwelt- und Selbstwahrnehmung, indem sie Zustände oder Veränderungen der Umgebung messen. Die Steuerungseinheit besteht aus Komponenten der Informatik und Telekommunikation, die zur Speicherung, Verarbeitung, Übertragung und Darstellung von Informationen dienen. Aktoren bzw. Aktuatoren ermöglichen die Aktionsfähigkeiten durch Antrieb und Bewegung des Roboters.
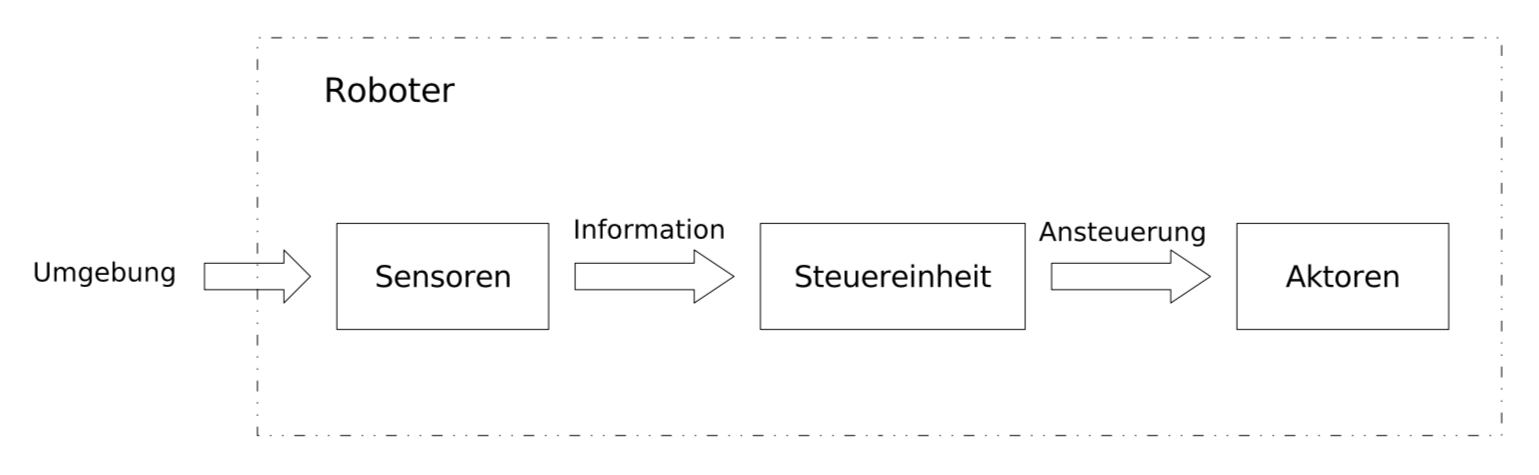
Blockschema der Teilsysteme eines Roboters (Oubbati, 2007, p. 10)
Der Begriff des Roboters hat jedoch in den letzten Jahren einen großen Wandel durchlaufen (Sziebig & Korondi, 2015). Roboter sind nicht mehr nur abgeschlossene Einheiten, die aus Sensoren, einer Steuereinheit und Aktoren bestehen. Roboter sind Teil größerer Informationsnetze, empfangen Befehle aus dem Internet, haben möglicherweise keine festen Sensoren an ihrem mechanischen Körper und sind in Autos, Unterhaltungselektronik oder Mobiltelefone eingebettet (Sziebig & Korondi, 2015).
Soziale Roboter
In der Literatur findet sich keine einheitliche Definition sozialer Roboter. Definitionen fallen je nach Forschungsrichtung und Kontext unterschiedlich aus. Zudem beinhalten Definitionen sozialer Roboter meist eine spezifische Sichtweise auf die Rollen, Aufgaben und soziale Interaktion mit Robotern. Gemeinsam ist den meisten Definitionen, dass die Interaktionsfähigkeiten ein zentrales Merkmal sozialer Roboter sind. Aus einer mensch-zentrierten Perspektive können soziale Roboter über die natürlicher Art und Weise der Interaktion definiert werden (Breazeal, 2004). Die Interaktion erfolgt meist über menschliche Sprache, Gestik, Mimik oder Körpersprache. Aus einer Roboter-zentrierten Perspektive werden soziale Roboter als verkörperte Akteure verstanden, die Teil der heterogenen Gruppe sind, fähig sind, sich gegenseitig zu erkennen, soziale Interaktionen zeigen, über Erinnerungen verfügen, miteinander kommunizieren und voneinander lernen (Fong, Nourbakhsh & Dautenhahn, 2003). Eine ähnliche Definition sozialer Roboter lautet:
„A physical entity embodied in a complex, dynamic, and social environment sufficiently empowered to behave in a manner conducive to its own goals and those of its community.“
(Duffy, 2003, p. 177)
In einem Bericht des Rechtsausschusses des Europäischen Parlaments mit Empfehlungen an die Kommission zu den zivilrechtlichen Regelungen im Bereich Robotik werden diese Eigenschaften für „intelligente autonome Roboter“ angeführt (Europäisches Parlament, 2017, p. 24):
- „die Fähigkeit, über Sensoren und/oder über den Datenaustausch mit seiner Umgebung (Interkonnektivität) Autonomie zu erlangen und diese Daten zu analysieren,
- die Fähigkeit, durch Erfahrung und Interaktion zu lernen,
- die Form der physischen Unterstützung des Roboters,
- die Fähigkeit, sein Verhalten und seine Handlungen an seine Umgebung anzupassen.“
Weitere Definitionen in der Literatur erwähnen folgende spezifischen Fähigkeiten sozialer Roboter:
- Zeigen und/oder Erkennen von Emotionen,
- Kommunikation über komplexere Sprache,
- Erkennen anderer Akteure,
- Aufbau und Erhalt sozialer Beziehungen,
- Verwenden menschlicher Gestik, Mimik und Körpersprache,
- Zeigen einer Persönlichkeit und eines eigenständigen Charakters,
- Lernen und Entwickeln sozialer Fähigkeiten,
- Verfügen über Erinnerungen,
- Folgen sozialer Regeln und anpassen an soziale Situationen.
In dieser Arbeit werden soziale Roboter als Handlungsträger und Akteure menschlicher Lebensräume verstanden. Neben den soziale Fähigkeiten ist die Handlungsträgerschaft wesentliches Merkmal sozialer Roboter. Die Handlungsträgerschaft bezieht sich auf die Fähigkeit Handlungen auszuführen, die Bezeichnung Akteur verweist auf die verstärkte Tendenz zur Eigenläufigkeit dieser technischen Systeme.
Roboter, deren Konstruktion der menschlichen Gestalt nachempfunden sind, werden auch als humanoide Roboter bezeichnet. In dieser Arbeit sind mit Robotern stets soziale Roboter gemeint. Andernfalls sind sie speziell angeführt, etwa Roboter in der Industrie.
